 GitBucket
GitBucket
|
|
|||
|---|---|---|---|
| .. | |||
| docs | 2 years ago | ||
| examples | 2 years ago | ||
| images | 2 years ago | ||
| zlac8015d | 2 years ago | ||
| README.md | 2 years ago | ||
| setup.py | 2 years ago | ||
A Python package of ZLAC8015D AC Servo Driver
This is a simple python package by using pymodbus to be able to access registers of ZLAC8015D.
You can find more detail of ZLAC8015D on their official site here.
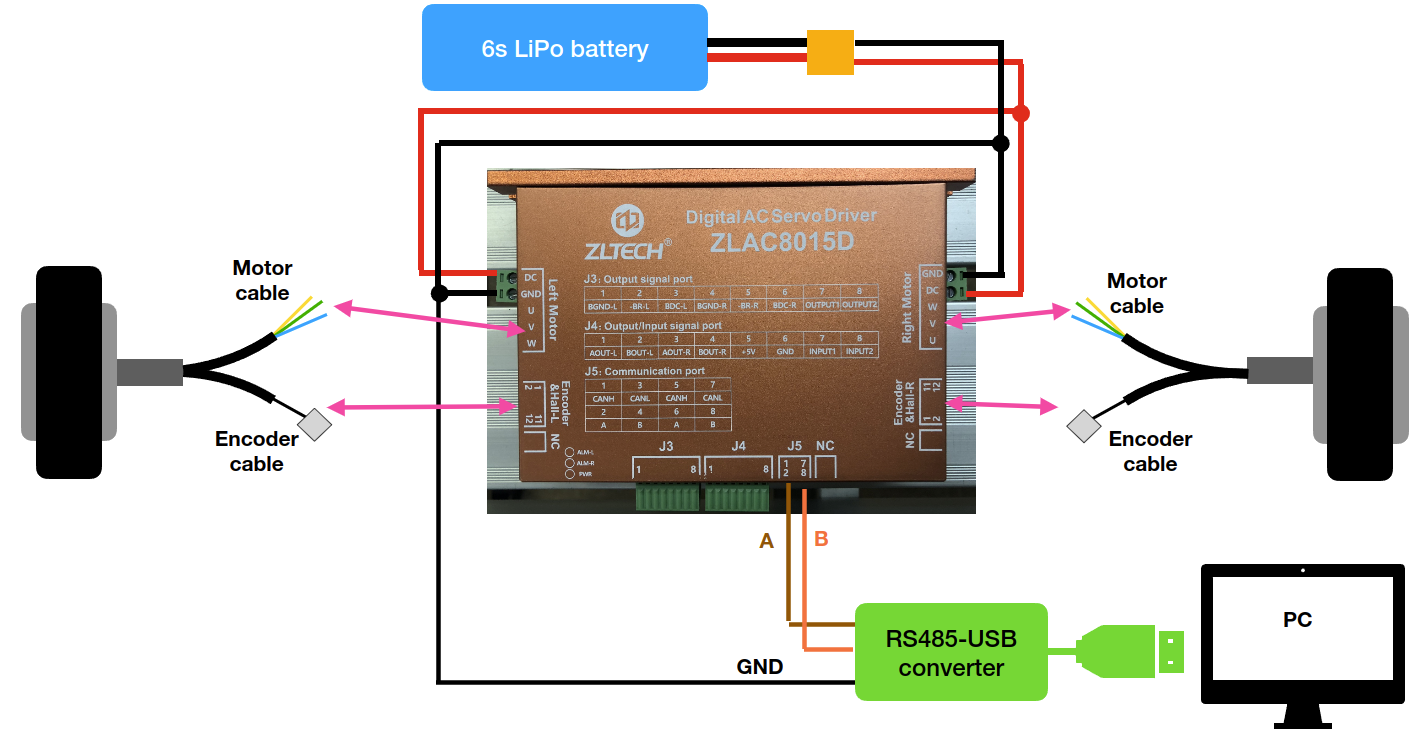
Hardware
ZLAC8015D is only compatible with dual 8 inch motors size.


Along with the driver, you will need to have RS485-USB converter to plug it on your PC. Please check on the following diagram.
Installation
#1. Install dependecies ## For python2 sudo pip install pymodbus ## or python3 sudo pip3 install pymodbus #2. Install this package ## For python2 sudo python setup.py install ## or python3 sudo python3 setup.py install #3. add user to dialout group sudo usermod -a -G dialout $USER
Features
-
Velocity control, we can send command RPMs and also read feedback RPMs from the motors, please check on
test_speed_control.py -
Position control, we can send how much angle or even direct distance to travel, in case of we are using default 8 inch wheel the circumference distance would be 0.655 meters. Please check on
test_position_control.py.
Those two control modes can be switched during operation, the initialization step has to be done every times when changed to another mode.
Remark
get_rpm() can be called in velocity control mode, but couldn't get feedback if in position control mode.
get_wheels_travelled() can be called in both modes.
modbus_fail_read_handler() is a helper function to handle failure read because some there is error of ModbusIOException.
Registers
For more information of data registers and example packets, please check on docs.